Bernardo Rocamora
Robotics Engineer and Scientist
Building robots to solve real-world problems.
About
Hi! I'm Bernardo! I have a background in Aeronautical/Mechanical Engineering and a PhD in Robotics. After spending a year in the UK through a Brazilian Science scholarship program, I developed a renewed interest in being nerdy and learning new things. So I decided to start grad school at my home university (Universidade de São Paulo) and got offered a position in the Fan Aeroacoustics group. I had a great experience doing fundamental Science research and finished my Master's degree — but something was missing.
I couldn't quite put my finger on it until I watched "Robots that Fly... and Cooperate" by Vijay Kumar on TED Talks. I wanted to build robots! I started taking online courses on Robotics, Control, and Computer Vision, and I was hooked. That's ultimately what drove me to move to the US in 2020 to pursue a PhD in Robotics. I did some cool research in motion planning and control for multi-robot systems and had the opportunity to work with some amazing people at West Virginia University.
After an internship at a startup in 2023, I decided to take the leap and join the startup world full time. I'm currently working at L5 Automation, where we're building robots to harvest strawberries. The challenge is real: strawberry plants grow dense canopies that make it hard for robots to find and pick the fruit. It's a very exciting problem, and I'm learning a lot every day.
When I'm not building robots, you can find me doing all sorts of things. I love testing new recipes, but also cooking my family's traditional dishes. I also enjoy being outside, whether it's going for a hike, taking photos, exploring new coffee shops, or rowing at Green Lake.
Projects

Frazor2
Strawberry Harvesting Robot.

TraitScout
Phenotyping Service.

Crusty
A bi-manual mobile platform built from ground up.

NASA Space Robotics Challenge Phase 2
Developing autonomous multi-robot software for simulated lunar resource excavation — 6th place out of 114 teams in NASA's Centennial Challenge.

Oxpecker: Tethered UAV for Underground Mine Inspection
A cooperative drone-ground robot system that autonomously maps underground stone mine pillars — no GPS, no battery swaps, no human in the loop.
Autonomous Navigation in Strong Currents
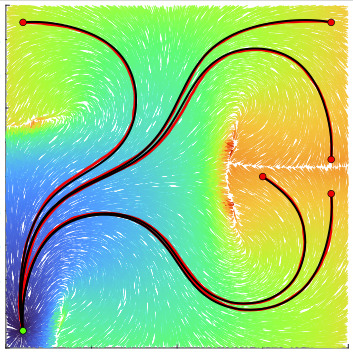
Optimal Policies for Autonomous Navigation in Strong Currents Using Fast Marching Trees.
Latest Posts
C++ Books
A list of C++ books I read or am reading.
Diátaxis
A good way to think about documentation.
Navigating Against the Current: An Interactive Tour of FlowFMT*
How do you plan paths for a robot when the flow it's swimming in is faster than it can swim? A visual, interactive walkthrough of the FlowFMT* algorithm.