Oxpecker: Tethered UAV for Underground Mine Inspection
Oxpecker: Tethered UAV for Underground Mine Inspection
A cooperative drone-ground robot system that autonomously maps underground stone mine pillars — no GPS, no battery swaps, no human in the loop.
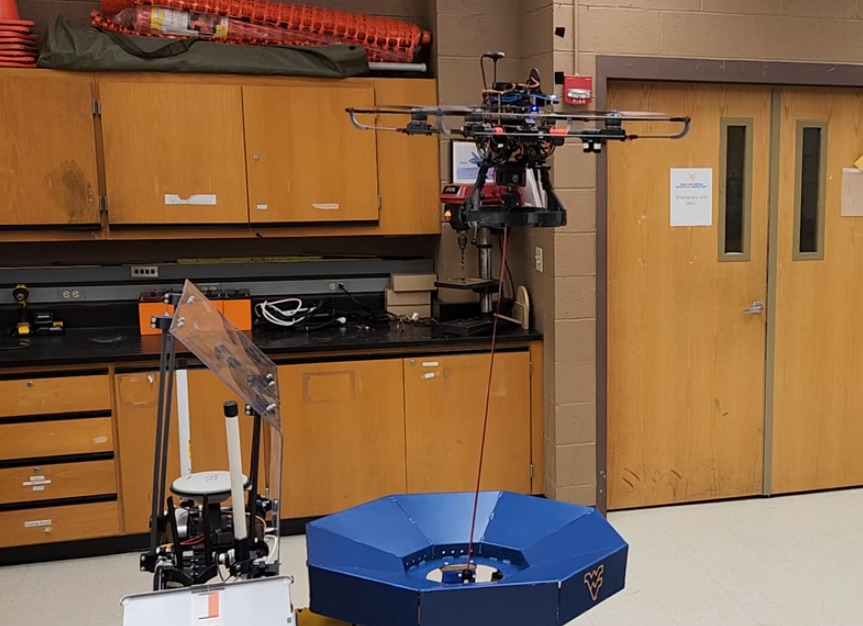
 Oxpecker (black drone) mounted on Rhino (yellow-and-blue UGV), ready for deployment inside a stone mine.
Oxpecker (black drone) mounted on Rhino (yellow-and-blue UGV), ready for deployment inside a stone mine.
The Problem
Underground stone mines rely on structural pillars that can reach 12 meters tall to keep the roof from collapsing. Monitoring their degradation over time is critical for worker safety — but it’s slow, dangerous work when done by humans, and nearly impossible to do thoroughly. Ground robots can’t see the full height of a pillar. Standard drones die after 10–12 minutes and go blind without GPS.
The industry needed a system that could autonomously survey pillars from floor to ceiling, return safely, and do it repeatedly across hundreds of pillars — all in a dark, featureless, GNSS-denied environment.
The Solution
We designed Oxpecker, a tethered UAV that rides on the back of a ground robot (Rhino) and deploys autonomously to scan each pillar. The tether solves two problems at once: it powers the drone from Rhino’s onboard batteries (eliminating flight time limits), and it acts as a sensor — measuring azimuth and elevation angles to guide the drone home without any external localization.
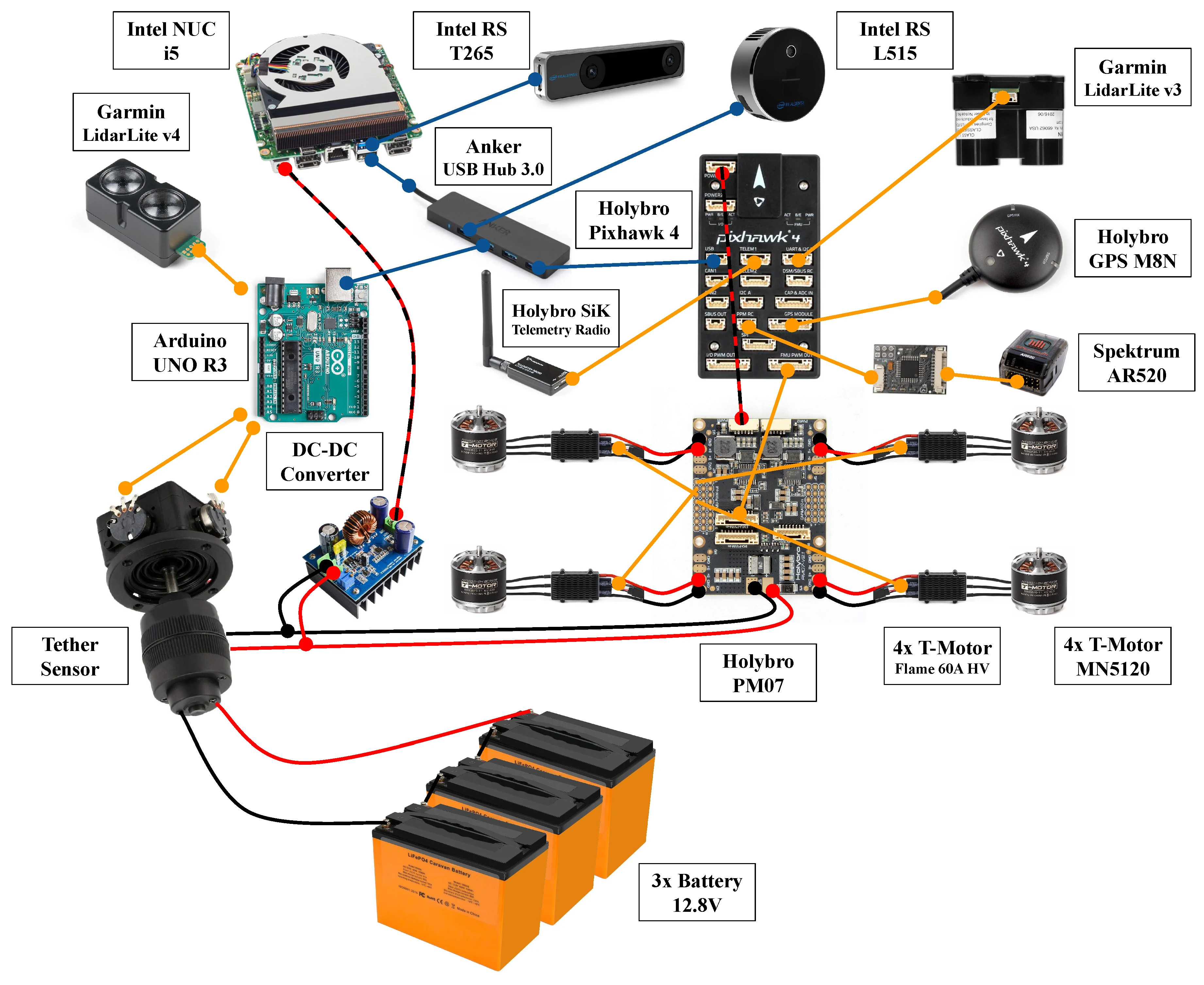 Hardware schematic of Oxpecker’s electronics. All components except the battery pack are carried onboard.
Hardware schematic of Oxpecker’s electronics. All components except the battery pack are carried onboard.
Key engineering decisions:
- Tether-powered flight at 38V — 570W delivered over a 15m cable, skipping onboard voltage converters to save weight, at the cost of ~123W of resistive loss (a trade-off we’d revisit with DC-DC converters in a future iteration)
- Reactive wall coverage — instead of hardcoded waypoints, Oxpecker uses LiDAR depth data to follow pillar faces and detect edges on the fly, adapting to non-planar surfaces and variable pillar widths
- Tether-guided landing — a switched vector field controller using only tether elevation angle and barometric altitude guides the drone back to a self-leveling landing platform on Rhino, with no vision or precise localization required
- Self-leveling landing platform — two linear actuators maintain a level surface even when Rhino is on sloped terrain, enabling safe touchdown every time
The full autonomy stack runs on ROS with a state machine coordinating takeoff, mapping, and landing phases across both vehicles over WiFi.
My Contributions
This was a collaborative research project. My specific contributions were:
Drone Design
Led the hardware design of Oxpecker itself: frame selection, powertrain sizing, cable specification, flight controller and companion computer integration, and sensor suite selection. The core challenge was balancing payload capacity, voltage trade-offs, and cable weight — all at a 4 kg takeoff limit.
 Oxpecker’s quadrotor frame with T-MOTOR MN3520 motors, Intel NUC companion computer, and RealSense sensor suite.
Oxpecker’s quadrotor frame with T-MOTOR MN3520 motors, Intel NUC companion computer, and RealSense sensor suite.
Autonomy Architecture
Designed the ROS-based autonomy framework, including the mission state machine that coordinates takeoff, wall coverage, and landing across the UAV and UGV. The architecture was built to be platform-agnostic: swapping the command node allowed the same mission logic to run on a DJI Matrice 100 during early integration testing.
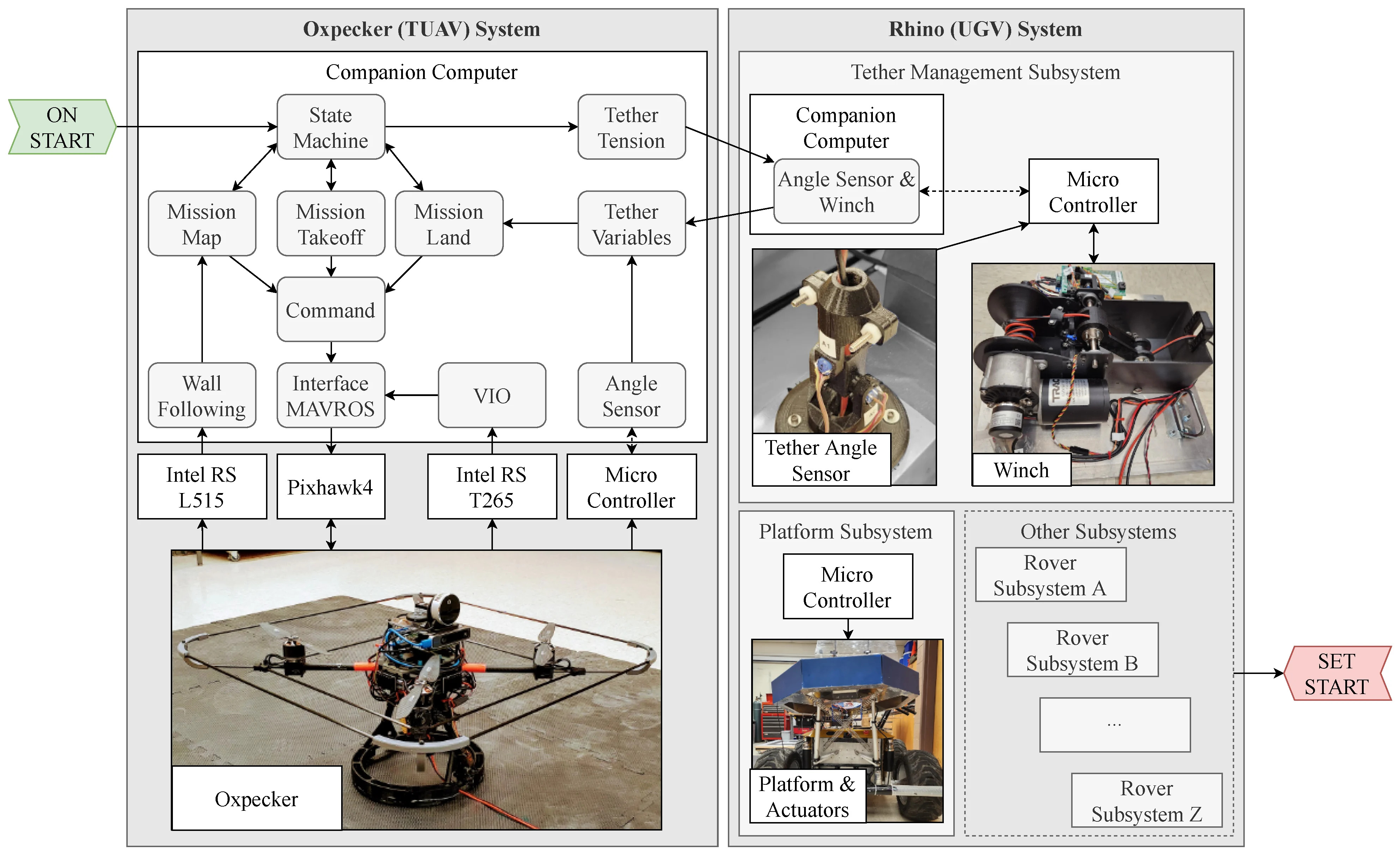 Cooperative autonomous system framework showing ROS nodes distributed between Oxpecker and Rhino.
Cooperative autonomous system framework showing ROS nodes distributed between Oxpecker and Rhino.
Tether Angle Sensor Kinematics
Derived the kinematic equations for the custom tether angle sensor mounted on Rhino’s landing platform. Using the Denavit–Hartenberg convention, I modeled the 2-DOF kinematic chain and solved for the tether’s azimuth and elevation angles from raw potentiometer readings — providing the angular measurements that make tether-guided landing and localization possible.
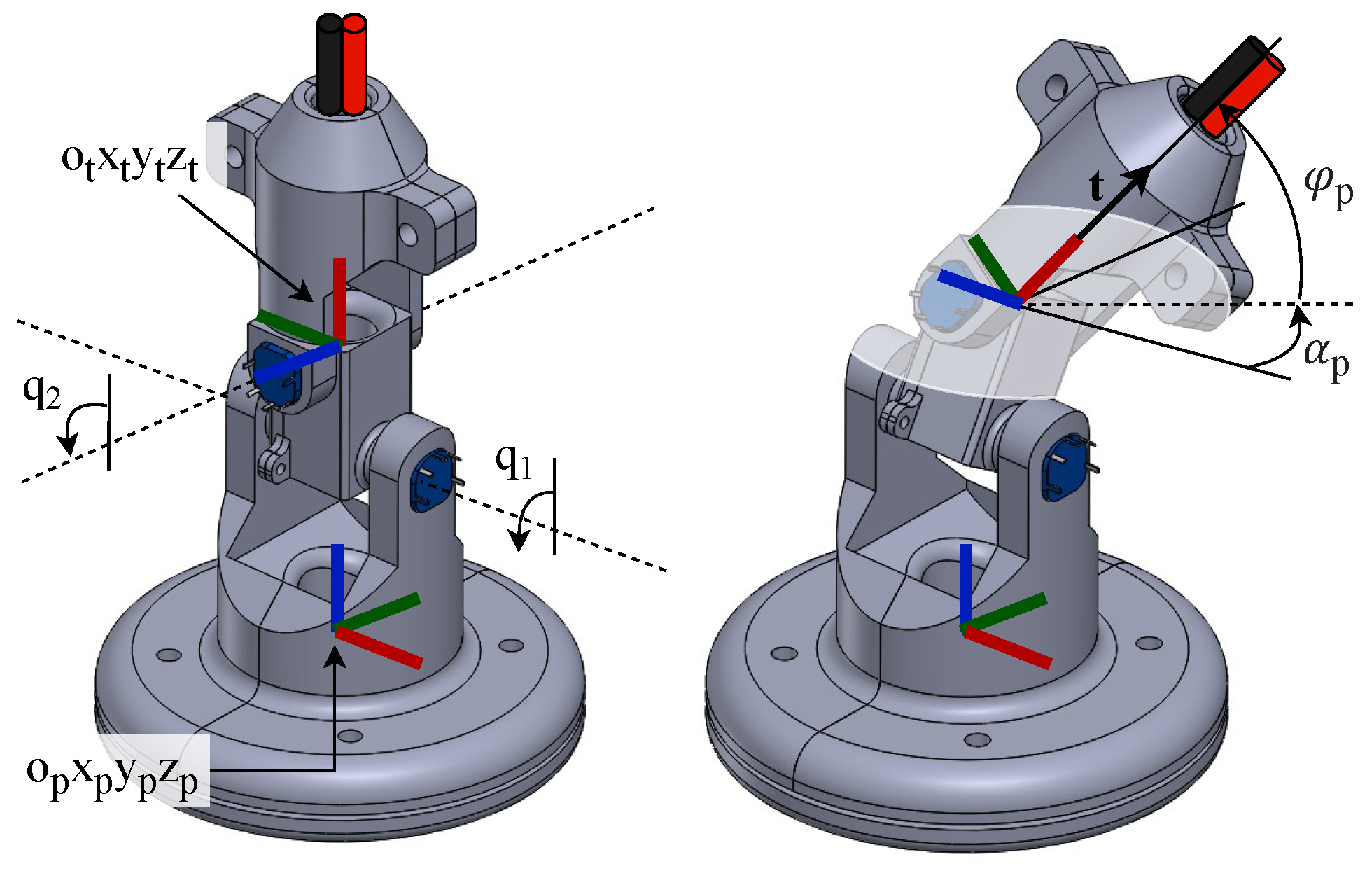 Custom 3D-printed tether angle sensor at the UGV side (left) and adapted analog joystick at the TUAV side (right).
Custom 3D-printed tether angle sensor at the UGV side (left) and adapted analog joystick at the TUAV side (right).
Impact
- Successfully mapped coal and stone mine pillars at the NIOSH Safety Research Mine in Pittsburgh, PA
- Tether-guided landing validated from 10 different starting positions with consistent success
- Sensor fusion odometry reduced position RMSE by ~3× compared to visual odometry alone (0.032m vs 0.074m in X)
- Data throughput of ~18 MB/s sustained during mapping missions; 2TB onboard storage supports up to 30 hours of flight data
- Published in Drones (MDPI), 2023 — open access
 3D point cloud map of a mine pillar face generated by Oxpecker using RTAB-Map RGB-D SLAM.
3D point cloud map of a mine pillar face generated by Oxpecker using RTAB-Map RGB-D SLAM.
 Trajectories from 10 successful tether-guided landings from different starting positions, as recorded by the T265 tracking camera.
Trajectories from 10 successful tether-guided landings from different starting positions, as recorded by the T265 tracking camera.
What I’d do differently: Transmit power at higher voltage with DC-DC converters on both ends. The current 38V approach loses ~123W to cable resistance; stepping up to 400V could reduce that loss by an order of magnitude and allow a lighter tether cable.
Technical Details
| Category | Details |
|---|---|
| Platforms | ROS (Noetic), PX4, MAVROS, Python, C++ |
| Flight Hardware | Holybro Pixhawk 4, Holybro X500 Frame, T-MOTOR MN3520 + FLAME 60A ESCs |
| Compute | Intel NUC i5-1135G7, Arduino UNO R3 |
| Sensors | Intel RealSense L515 (LiDAR), RealSense T265 (VIO), Garmin LidarLite v3/v4, UWB DWM1001 |
| Algorithms | Reactive wall following, lawnmower coverage planning, switched vector field landing, EKF sensor fusion, RTAB-Map, Denavit–Hartenberg kinematics |
| Domains | Aerial robotics, GNSS-denied navigation, autonomous landing, 3D mapping, UGV-UAV coordination |
Links
- 📄 Paper — Drones 2023, 7, 73
- 🎥 Experiment Videos
- 🏛️ Funded by the Alpha Foundation for Mine Safety and Health (Grant AFC820-69)